
 |
Census Transform (CT) summaries local shape and textures by comparing a pixel with its 8 neighbors, such that any 3x3 image region is mapped to one of the 256 discrete cells. |
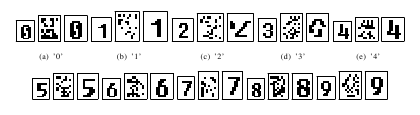 |
As shown by this example, we can reconstruct the input image (the left one in each three-image group) requiring that the reconstructed image (the right one in each group). The middle one in each group is the random starting state for the reconstruction algorithm, which try to minimize the difference between CT histogram of the current state and the desired CT histogram. |